CSCI H343 Data Structures Fall 2024
Segment Intersection
[Note] This is a group project. Students may work in groups of 3 ~ 4 people, or by themselves. After completion, every group member submits their solutions on Autograder individually.
Before We Start (Optional)
- Read Textbook Ch. 4.4 carefully, especially the code listings from Fig. 4.37 to Fig. 4.44.
- Read CLRS Ch. 33.1 and 33.2 for an introduction to segment intersection.
Introduction
In this project, we consider a classic problem in computational geometry: Given a set of n line segments, identify an intersecting pair, if one exists. The naive approach is to check all possible pairs for intersection. That is, for every line segment check whether it intersects with every other line segment. We can determine if two lines intersect in $O(1)$ time, so this algorithm requires $O(n^2)$ time to examine all pairs. A better approach is to use a Line Sweep Algorithm (CLRS Ch. 33.2), which solves the problem in $O(n log(n))$ time.
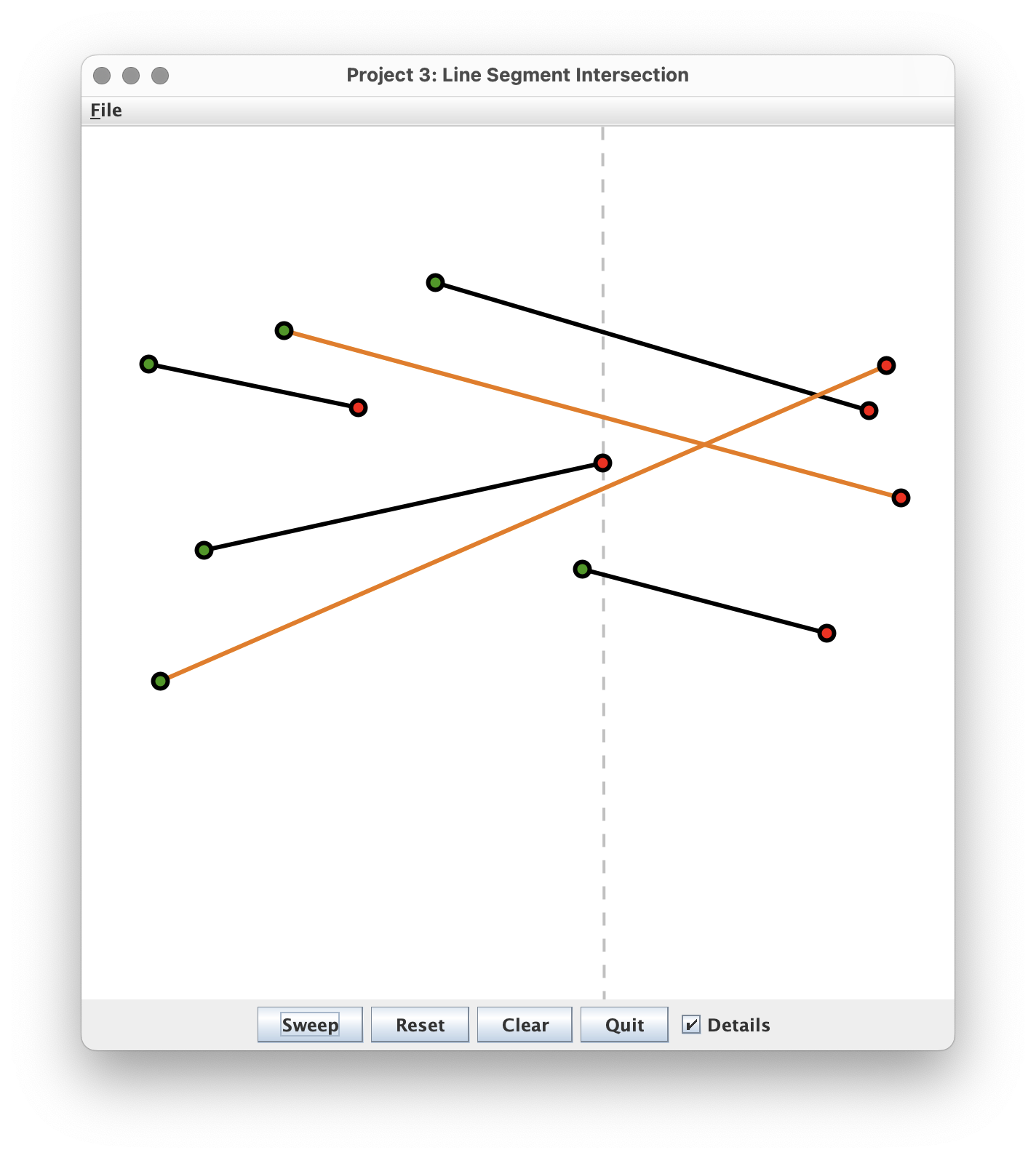
A line segment is described by two endpoints, which we shall refer to as the left endpoint (shown in green) and the right endpoint (shown in red). In the first step of the algorithm, we sort all the endpoints by their x-coordinates. This requires $O(n log(n))$ time in the worst case. We then sweep a vertical line from left to right across the plane. Each time the sweep line (shown as a dashed gray line) touches an endpoint, the algorithm processes the event.
The main data structure is a binary search tree that, at any given time, contains just those line segments that intersect the sweep line. The segments are ordered in the tree according to the y-coordinate of the point of where the segment intersects the sweep line. For each endpoint the sweep line encounters as it passes across the plane, it stops and takes one of the following actions depending on whether the endpoint is green or red:
-
[green = left endpoint] Insert the line segment associated with this endpoint into the tree. Check for an intersection of this newly entered line segment with the one immediately above it on the sweep line. If they intersect, then highlight the two segments and stop. Otherwise, check for an intersection of this line segment with the one immediately below it on the sweep line. If they intersect, then highlight the two segments and stop. Otherwise, proceed with the sweep.
-
[red = right endpoint] Find the line segments immediately above and below this one on the sweep line. If they intersect, then highlight the two segments and stop. Otherwise, remove the line segment associated with this red endpoint from the tree and proceed with the sweep.
In the worst case, we need to process $O(n)$ endpoints. To achieve our desired complexity of $O(n log(n))$, we need to process each endpoint in $O(log(n))$ time. If we use a self-balancing binary search tree (such as an AVL tree) to hold the line segments intersecting the sweep line, then we can find the segments that are above and below a given segment in $O(log(n))$ time.
Submission
As usual, this project contains a programming part and a testing part. You are expected to test your code locally as you develop the program.
- Submit your code
AVLTree.javaandBinarySearchTree.javato link. - Submit your test cases
StudentTest.javato link.- We have included a small test case in the support code to get you started.
Student Support Code and Task Description
.
├── SegmentIntersection.iml
├── src
│ ├── AVLTree.java // your code
│ ├── BinarySearchTree.java // your code
│ ├── Constants.java
│ ├── Driver.java
│ ├── GUI.java
│ ├── LineSegment.java
│ ├── OrderedSet.java
│ └── Sweeper.java
└── test
└── StudentTest.java // your tests
Implementations of the GUI and the Line Sweep Algorithm are provided to you in full in the student support code.
Your task is to complete the implementation of the
BinarySearchTree and AVLTree class.
⚠️You are NOT supposed to modify any code outside the two classes
(marked as “read-only” in the project structure below).
Implement all of the methods marked TODO according to their descriptions
in the comments. DO NOT change their function signatures.
The BinarySearchTree class is an elaboration of the class described in
lecture and that you used in the NextPrevTree Lab.
The AVLTree class is a subclass of BinarySeachTree and
overrides the insert() and remove() methods to ensure that the tree remains
balanced at all times (which gives us the $O(log(n)$) time bound we crave).
Below is a summary of the components in the code base.
However, before you begin writing any code, you need to understand the
design of the interfaces in OrderedSet.java. So, that’s the first place
you should look.
-
OrderedSet[read-only] is an interface that describes the OrderedSet ADT through which the Line Sweep Algorithm will access the binary search tree. In this same file, you will find the interface definition forLocation, which is used bysearch()to report the result of a look up. Furthermore, aLocationmust provide operations to access the previous and next elements with respect to inorder traversal, manifested by theprevious()andnext()methods. These methods are used by the Line Sweep Algorithm to determine the line segments that are immediately above or below the current segment. -
BinarySearchTree[YOUR TASK] is a generic class corresponding to a binary search tree. The ordering for the data in the tree is specified by a function of typeBiPredicateand provided at construction time. Nodes in the tree are represented by the innerNodeclass. So that we can useNodeas a return value fromsearch(),Nodeimplements theLocationinterface. ANodecontains the usual fields:key,left, andright. You will add two more fields:parent(which points to the node’s parent in the tree) andheight(which is the height of the subtree rooted at this node). -
AVLTree[YOUR TASK] is a class representing a height-balanced tree. SinceAVLTreeis a subclass ofBinarySearchTree, you will need a fully functioning implementation ofBinarySearchTreebefore you can begin working on this class. However, this is the most interesting and important part of this entire project, so make sure you allow yourself enough time to work on it.
We can maintain the height information in the tree nodes so that it is immediately available to us whenever we need it. This means that when a new node is inserted or removed from the tree, we may have to adjust the heights of the nodes along the path up to the root.
Each node maintains a pointer to its parent node. We will require this
information when implementing the AVLTree.
The root has no parent so its parent is null.
-
Constants[read-only] is an interface containing a few global constants for the project. -
Driver[read-only] is the main entry for the project. This is where you go to launch the GUI, draw the line segments, and run the sweep algorithm. -
GUI[read-only] is the class that implements the graphical user interface. -
LineSegment[read-only] is a class that represents a line segment. In this same file, you will find class definitions for Endpoint (and its subclasses, LeftEndpoint and RightEndpoint), and the SweepLine. -
Sweeper[read-only] is the class that implements the Line Sweep Algorithm. Be sure to read through this code to help you understand how the algorithm works.
- You have finally reached the end of the Project. Congratulations!