course-web-page-Fall-2021
Repository for the Fall 2021 course web page
View the Project on GitHub IUDataStructuresCourse/course-web-page-Fall-2021
Lecture: Shortest Paths
We have seen the shortest path problem where each edge counts as distance 1 and we used BFS to solve it. Now we consider graphs where each edge has a real number for its weight.
Notation: We write w(u,v) or w(e) for the weight of an edge.
Definition The weight of a path is the sum of the weights of its edges. We also use the term distance for the weight of a path.
So for path p = e₁, e₂, …, eᵣ
w(p) = Σ{i∈1..r} w(eᵢ)
Motivation for the shortest path problem:
- internet packet routing
- driving routes
- minimizing flight duration
As with BFS, we’ll focus on the single-source shortest-paths problem: finding the shortest path from a source vertex to every other vertex in the graph. Other alternatives are:
- Single-destination shortest-paths
- Single-pair shortest-path
- All-pairs shortest-paths
Algorithm Preview
- Bellman-Ford: O(nm)
- Disjktra:
- using min-heap: O((n+m) log(n))
- using Fibonnaci heap: O(n log(n) + m)
- DAG Shortest: O(n+m) (uses topological sort)
Brute force: compute the length of every path
But this is exponential time: there are O(2^n) paths. Here’s a worst-case scenario.
Shortest paths exhibit optimal substructure
That is, a subpath of a shortest path is a shortest path.
More precisely, if you have a shortest path
v₀ →ᵣ vᵢ →p vⱼ →q vk
then the subpath p
vᵢ →p vⱼ
is a shortest path from vᵢ to vⱼ.
Proof. Suppose vᵢ →p vⱼ is not a shortest path from vᵢ to vⱼ. Then we splice the shortest path p’ from vᵢ to vⱼ into the path v₀ → vk to get
v₀ →ᵣ vᵢ →p' vⱼ →q vk
which is a shorter path from v₀ to vk. But that contradicts the assumption that
v₀ →ᵣ vᵢ →p vⱼ →q vk
was a shortest path.
Take away: we can build shortest paths by growing them from smaller shortest paths.
Notation: d(u,v) is the weight of the shortest path from u to v.
Negative-weight edges
Motivation: weak, not very common
Some shortest-path algorithms handle this (Bellman-ford), some do not (Dijkstra, DAG Shortest Paths).
None of them handle graphs with negative-weight cycles, as the notion of shortest-path doesn’t make sense on such graphs.
Example:
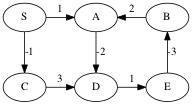
The shortest path from S to C is -1.
The shortest path from S to A is undefined because you can keep going around the cycle A → D → E → B, which has weight -2.
We can avoid negative weights in some situations by shifting weights up.
Triangle Inequality
For all edges u → v, d(s,v) ≤ d(s,u) + w(u,v).
Proof: s → u → v is a path from s to v, and d(s,v) is the weight of the shortest path.
Relaxation
We maintain a current best path length, an upper bound, on the distance to a vertex.
We relax an edge by updating the distance of the target vertex if this edge provides a shorter path to it.
static void relax(Edge e, double[] distance, int[] parent,
Map<Edge,Double> weight) {
if (distance[e.target] > distance[e.source] + weight.get(e)) {
distance[e.target] = distance[e.source] + weight.get(e);
parent[e.target] = e.source;
}
}
Dijkstra Shortest Paths
Like BFS, the idea is to expand the wavefront of shortest-paths so far.
The challenge is to figure out how to explore paths in the order of their weight. Consider the following graph with the source vertex S.
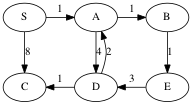
Growing the shortest paths tree in order of path weight:
W=0 S
W=1 S-->A
W=2 S-->A-->B
W=3 S-->A-->B
|
V
E
W=5 S-->A-->B
| |
V V
D E
W=6 S-->A-->B
| |
V V
C<--D E
Dijkstra’s solution is to store all the potential next vertices (those that are adjacent to the tree) in a priority queue ordered by their distance as computed by the current tree plus the weight of the lightest edge to that vertex. Then the minimum of the priority queue gives the next shortest path.
SPT Priority Queue
W=0 S A:1, C:8
W=1 S---A B:2, D:5, C:8
W=2 S---A---B E:3, D:5, C:8
W=3 S---A---B D:5, C:8
|
|
E
W=5 S---A---B C:6 (decrease key!)
| |
| |
D E
W=6 S---A---B
| |
| |
C---D E
Student group work: use Dijkstra’s to compute the distances from S to all the other vertices in the following graph.
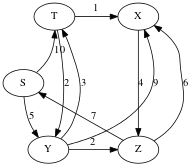
Answers:
S: 0
T: 8
X: 9
Y: 5
Z: 7
Time Complexity of Dijkstra’s Algorithm
- n pushes to the queue: O(n log(n))
- n pops from the queue: O(n log(n))
- m
decrease_keyon the queue: O(m log(n)) - Total: O((n+m) log(n))